Note
Go to the end to download the full example code.
2D Biased Double Well¶
Estimation of an overdamped Langevin in presence of biased dynamics.
import numpy as np
import matplotlib.pyplot as plt
import folie as fl
from mpl_toolkits.mplot3d import Axes3D
from copy import deepcopy
import time
checkpoint1 = time.time()
x = np.linspace(-1.8, 1.8, 36)
y = np.linspace(-1.8, 1.8, 36)
input = np.transpose(np.array([x, y]))
D = 0.5
diff_function = fl.functions.Polynomial(deg=0, coefficients=D * np.eye(2, 2))
a, b = 5, 10
drift_quartic2d = fl.functions.Quartic2D(a=D * a, b=D * b) # simple way to multiply D*Potential here force is the SDE force (meandispl) ## use this when you need the drift ###
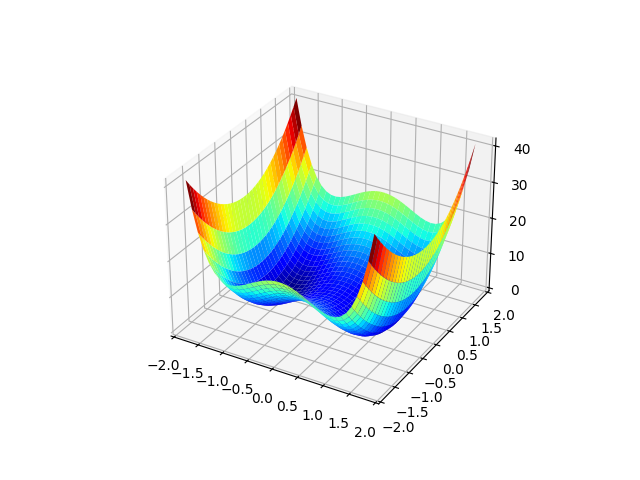
quartic2d = fl.functions.Quartic2D(a=a, b=b) # Real potential , here force is just -grad pot ## use this when you need the potential energy ###
X, Y = np.meshgrid(x, y)
# Plot potential surface
pot = quartic2d.potential_plot(X, Y)
fig = plt.figure()
ax = plt.axes(projection="3d")
ax.plot_surface(X, Y, pot, rstride=1, cstride=1, cmap="jet", edgecolor="none")
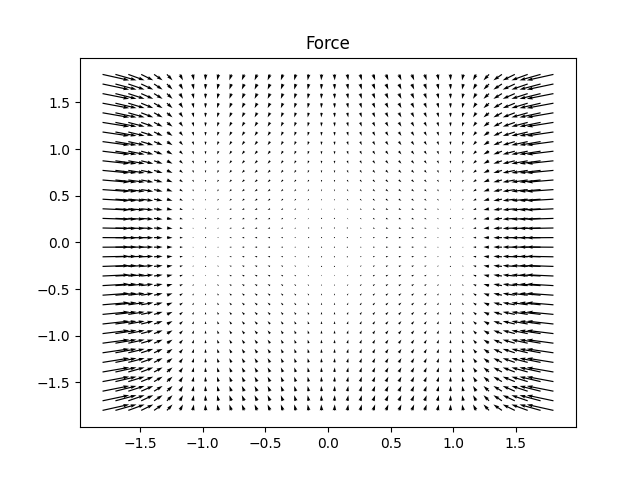
# Plot Force function
ff = quartic2d.force(input) # returns x and y components of the force : x_comp =ff[:,0] , y_comp =ff[:,1]
U, V = np.meshgrid(ff[:, 0], ff[:, 1])
fig, ax = plt.subplots()
ax.quiver(x, y, U, V)
ax.set_title("Force")
##Definition of the Collective variable function of old coordinates
def colvar(x, y):
gradient = np.array([1, 1])
return x + y, gradient # need to return both colvar function q=q(x,y) and gradient (dq/dx,dq/dy)
dt = 1e-3
model_simu = fl.models.overdamped.Overdamped(drift_quartic2d, diffusion=diff_function)
simulator = fl.simulations.ABMD_2D_to_1DColvar_Simulator(fl.simulations.EulerStepper(model_simu), dt, colvar=colvar, k=25.0, qstop=1.2)
# Choose number of trajectories and initialize positions
ntraj = 20
q0 = np.empty(shape=[ntraj, 2])
for i in range(ntraj):
for j in range(2):
q0[i][j] = -1.2
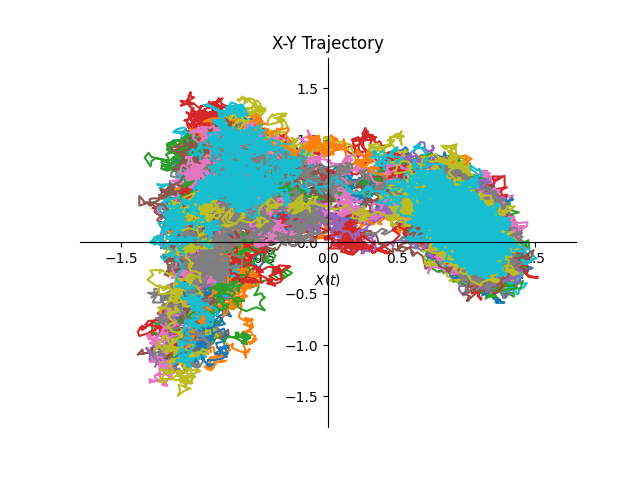
# CALCULATE TRAJECTORY ##¶
time_steps = 10000
data = simulator.run(time_steps, q0, save_every=1)
# Plot the resulting trajectories
fig, axs = plt.subplots()
for n, trj in enumerate(data):
axs.plot(trj["x"][:, 0], trj["x"][:, 1])
axs.spines["left"].set_position("center")
axs.spines["right"].set_color("none")
axs.spines["bottom"].set_position("center")
axs.spines["top"].set_color("none")
axs.xaxis.set_ticks_position("bottom")
axs.yaxis.set_ticks_position("left")
axs.set_xlabel("$X(t)$")
axs.set_ylabel("$Y(t)$")
axs.set_title("X-Y Trajectory")
axs.set_xlim(-1.8, 1.8)
axs.set_ylim(-1.8, 1.8)
axs.grid()
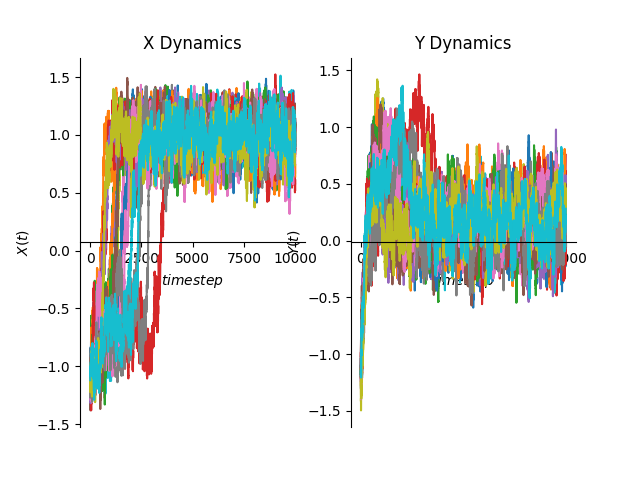
# plot x,y Trajectories in separate subplots
fig, bb = plt.subplots(1, 2)
for n, trj in enumerate(data):
bb[0].plot(trj["x"][:, 0])
bb[1].plot(trj["x"][:, 1])
# Set visible axis
bb[0].spines["right"].set_color("none")
bb[0].spines["bottom"].set_position("center")
bb[0].spines["top"].set_color("none")
bb[0].xaxis.set_ticks_position("bottom")
bb[0].yaxis.set_ticks_position("left")
bb[0].set_xlabel("$timestep$")
bb[0].set_ylabel("$X(t)$")
# Set visible axis
bb[1].spines["right"].set_color("none")
bb[1].spines["bottom"].set_position("center")
bb[1].spines["top"].set_color("none")
bb[1].xaxis.set_ticks_position("bottom")
bb[1].yaxis.set_ticks_position("left")
bb[1].set_xlabel("$timestep$")
bb[1].set_ylabel("$Y(t)$")
bb[0].set_title("X Dynamics")
bb[1].set_title("Y Dynamics")
PROJECTION ALONG CHOSEN COORDINATE #¶
# Choose unit versor of direction
u = np.array([1, 1])
u_norm = (1 / np.linalg.norm(u, 2)) * u
w = np.empty_like(trj["x"][:, 0])
b = np.empty_like(trj["x"][:, 0])
proj_data = fl.data.trajectories.Trajectories(dt=dt) # create new Trajectory object in which to store the projected trajectory dictionaries
fig, axs = plt.subplots()
for n, trj in enumerate(data):
for i in range(len(trj["x"])):
w[i] = np.dot(trj["x"][i], u_norm)
b[i] = np.dot(trj["bias"][i], u_norm)
proj_data.append(fl.Trajectory(1e-3, deepcopy(w.reshape(len(trj["x"][:, 0]), 1)), bias=deepcopy(b.reshape(len(trj["bias"][:, 0]), 1))))
axs.plot(proj_data[n]["x"])
axs.set_xlabel("$timesteps$")
axs.set_ylabel("$w(t)$")
axs.set_title("trajectory projected along $u =$" + str(u) + " direction")
axs.grid()
![trajectory projected along $u =$[1 1] direction](../../_images/sphx_glr_plot_biased_2D_Double_Well_005.png)
# MODEL TRAINING ##¶
checkpoint2 = time.time()
domain = fl.MeshedDomain.create_from_range(np.linspace(proj_data.stats.min, proj_data.stats.max, 4).ravel())
trainmodel = fl.models.OverdampedSplines1D(domain=domain)
xfa = np.linspace(proj_data.stats.min, proj_data.stats.max, 75)
drift_exact = (xfa**2 - 1.0) ** 2
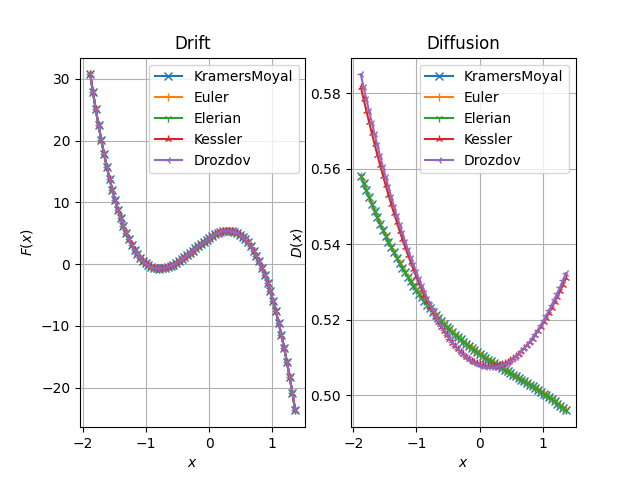
fig, axs = plt.subplots(1, 2)
axs[0].set_title("Drift")
axs[0].set_xlabel("$x$")
axs[0].set_ylabel("$F(x)$")
axs[0].grid()
axs[1].set_title("Diffusion")
axs[1].set_xlabel("$x$")
axs[1].set_ylabel("$D(x)$")
axs[1].grid()
KM_Estimator = fl.KramersMoyalEstimator(deepcopy(trainmodel))
res_KM = KM_Estimator.fit_fetch(proj_data)
axs[0].plot(xfa, res_KM.drift(xfa.reshape(-1, 1)), marker="x", label="KramersMoyal")
axs[1].plot(xfa, res_KM.diffusion(xfa.reshape(-1, 1)), marker="x", label="KramersMoyal")
print("KramersMoyal ", res_KM.coefficients)
for name, marker, transitioncls in zip(
["Euler", "Elerian", "Kessler", "Drozdov"],
["|", "1", "2", "3"],
[
fl.EulerDensity,
fl.ElerianDensity,
fl.KesslerDensity,
fl.DrozdovDensity,
],
):
estimator = fl.LikelihoodEstimator(transitioncls(deepcopy(trainmodel)))
res = estimator.fit_fetch(deepcopy(proj_data))
print(name, res.coefficients)
axs[0].plot(xfa, res.drift(xfa.reshape(-1, 1)), marker=marker, label=name)
axs[1].plot(xfa, res.diffusion(xfa.reshape(-1, 1)), marker=marker, label=name)
axs[0].legend()
axs[1].legend()
checkpoint3 = time.time()
print("Training time =", checkpoint3 - checkpoint2, "seconds")
print("Overall time =", checkpoint3 - checkpoint1, "seconds")
plt.show()
KramersMoyal [ 30.71649137 -43.67528562 47.17982055 -23.67474057 0.55823587
0.50837918 0.51151879 0.49603091]
Euler [ 30.71649137 -43.67528562 47.17982055 -23.67474057 0.55823587
0.50837918 0.51151879 0.49603091]
Elerian [ 30.71649137 -43.67528562 47.17982055 -23.67474057 0.55823587
0.50837918 0.51151879 0.49603091]
Kessler [ 30.71676539 -43.67519393 47.17997269 -23.67517801 0.58169736
0.50211745 0.48933294 0.53096499]
Drozdov [ 30.71670615 -43.67521385 47.17999026 -23.67509516 0.58501043
0.50211185 0.48743717 0.53233277]
Training time = 11.307701826095581 seconds
Overall time = 14.38679313659668 seconds
Total running time of the script: (0 minutes 14.494 seconds)